E-Fomula차량 전기팀장을 맡게된 FSK2023 직전인 2023년 7월부터 FSK2024가 열린 2024년 9월까지 발생했던 이슈들에 대해서 정리해봤습니다.
혹시 다음에 같은 문제가 발생한다면 참고했으면 좋겠습니다.
1. 모터 컨트롤러 사망
모터 컨트롤러의 B+와 B-를 반대로 연결하여 문제가 발생했다.
다시 올바르게 연결한 뒤 전원을 켰을 때 컴퓨터와 정상적으로 CAN 통신이 가능하며 셋팅 업로드도 가능했다. 하지만 모터 구동이 되지 않았으며, 모터 컨트롤러 내부에 MOSFET와 레귤레이터 등이 터져있는 것을 확인했다. 또한 모터의 엔코더 보드도 손상을 입었다.
대전에 있는 2곳의 사설 수리업체에 수리를 의뢰했으나 두 곳 모두에서 수리 거부당해 수리를 포기했다.
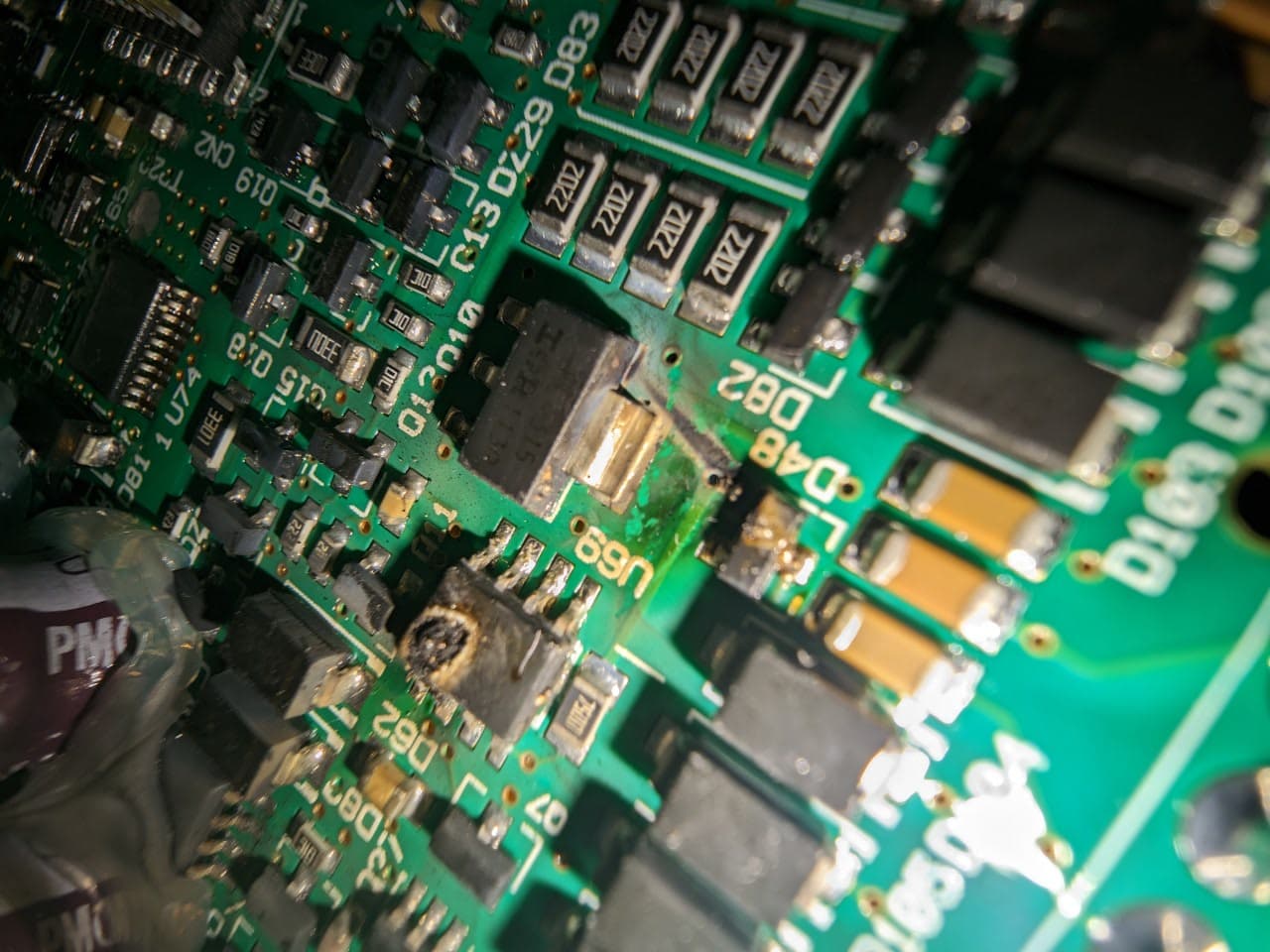
(모터컨트롤러 내부에 터져있는 소자들)
2. 엔코더 사망
B+ B-를 반대로 연결하면서 모터 내부의 엔코더 보드 손상을 입었다.
기존의 엔코더와 같은 모델을 검색하여 해외 주문으로 교체하여 해결했다.
요새 ME1616의 엔코더 보드 구하기가 쉽지 않다고 들어서 만약 고장 났다면 잘 찾아보셔야 할 것 같습니다.
3. 엔코더 미지원 모델
역극성 연결로 인해 손상을 입은 모터 컨트롤러 수리를 포기하고 이베이에서 중고로 모터 컨트롤러를 구입했다.
하지만 DVT로 확인했을 때 엔코더 값이 정상적으로 뜨지 못하는 문제가 발생했다. 계속 교차검증을 하며 확인한 결과 모터 컨트롤러 고장을 잠정 결정했다.
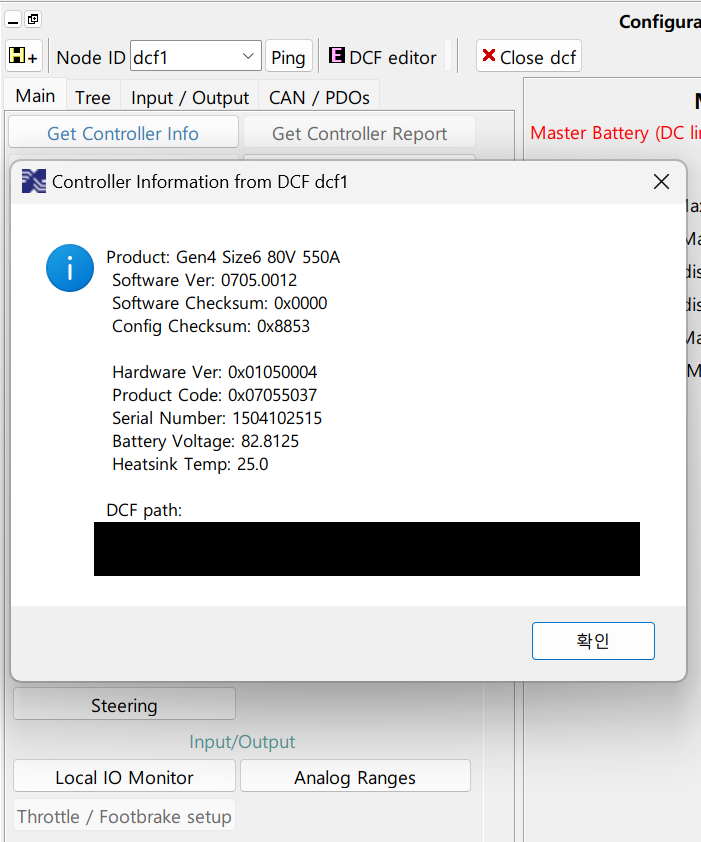
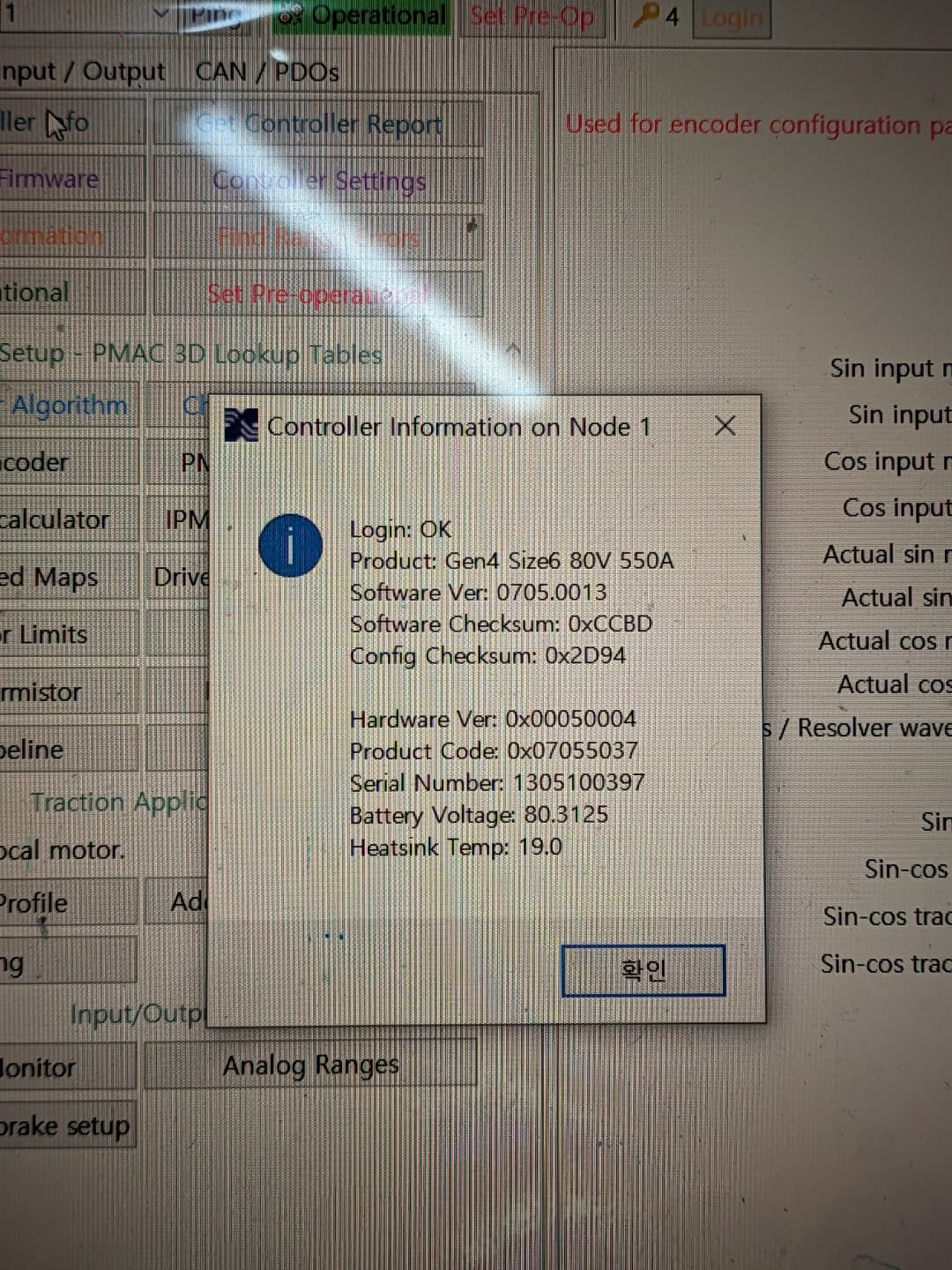
세브콘 관련 문서를 뒤지던 중 옛날 버전의 어플리케이션 노트에서 sin-cos 엔코더를 지원하지 않는 모델이 존재한다는 것을 알게 되었다. 곧바로 중고로 구매한 모터 컨트롤러의 하드웨어 버전을 조회하였고, 미지원 모델임을 확인하였다.
홍익대 라이트온에서 모터 컨트롤러를 중고로 구매하여 해결하였다.


(어플리케이션 노트에 적혀있는 내용)
(Sin-Cos 엔코더 지원 모델)
(Sin-Cos 엔코더 미지원 모델)
4. 캔 쇼트
알 수 없는 이유로 갑자기 캔 포트에서 스파크가 튀며 쇼트가 발생해 캔 포트와 캔 어댑터 사망하였다. 아마 작업장 습기로 인해 포트에 물이 유입되며 문제가 발생한 것으로 추측된다. 해당 사건 이전과 이후에도 작업장 습기 때문에 컨버터 터지고 PCB 터지는 일이 몇 번이나 발생했다.
캔 어댑터는 국내 업체(임베디드 시스템 코리아)에서 구입하여 당일 발송으로 빠르게 받았다. 임베디드 시스템 코리아 기준 절연형 모델은 528,000원, 절연형이 아닌 모델은 440,000원인데 만약 절연형이 아닌 모델을 사용했더라면 본인 노트북도 같이 사망하지 않았을까 하는 생각에 비싸더라도 절연형 모델로 재구입했다.
새 캔 어댑터를 연결했을 때 캔 통신 값이 들어오긴 하지만 규격에 맞지 않는 정보가 들어와 통신 에러가 계속 떠 한참 헤맸다. 원인은 모터 컨트롤러 내부 종단저항이 사망해서 일어난 문제였으며, 외부 종단저항을 달아줌으로써 해결하였다.
5. 엔코더 안잡히는 문제
엔코더 값이 제대로 출력되지 않는 문제 발생했다. 이로 인해 모터 컨트롤러에서 LED가 7번 깜박이는 Analog Range Fault를 띄웠다.
APPS 신호 절연을 위해 사용한 소자 구동에 모터 컨트롤러의 5V 출력을 사용했다. 하지만 모터 컨트롤러에서 지원하는 최대 출력을 넘겨서 사용하는 바람에 엔코더에 충분한 전력을 공급하지 못하여 엔코더가 정상 작동하지 못하여 문제가 발생하였다.
소자 구동은 LV에서 전원을 끌어다 쓰는 방법으로 변경하여 모터 컨트롤러 5V 출력에서 전력을 사용하지 않게 하였고 문제가 해결되었다.
6. 초기 구동 안 됨
모터 컨트롤러가 처음 켜지면 모터가 엔코더 앵글 오프셋을 안 맞춘 것처럼 살짝 돌다가 턱 걸려서 돌지 않는 문제 발생했다. 모터 작동 시 전류가 들어가는 소리는 들리지만, 모터는 돌지 않았다. 손으로 강제로 바퀴들 한 바퀴 정도 굴리면 그 뒤로는 정상적으로 모터가 잘 구동되었고, 모터 컨트롤러 전원을 끄기 전까지는 다시 문제 발생하지 않았다.
원인은 엔코더 Configuration 설정 실수였다. 엔코더의 Min Max 셋팅을 실제 엔코더 출력의 Min Max 사이에 설정하여 설정된 값보다 크거나 작은 값이 들어오면 모터가 멈춰버리는 문제가 발생한 것이었다. 보통 이렇게 셋팅이 안맞으면 Dynamic Range 에러가 뜨는데 희한하게 이 경우에는 해당 에러도 발생하지 않아서 한참 해맸었다.
Pre-Op상태로 손으로 바퀴를 돌려 실제 엔코더 출력 Min Max 값을 확인한 후 올바르게 설정하여 문제를 해결하였다.
엔코더 셋팅이 이상한데 손으로 굴린 뒤에 차량이 구동되는 건 아마 강제로 엔코더의 Min Max 값을 한번 찍고나면 모터 컨트롤러 내부에서 알아서 인식해서 구동한 게 아닐까 싶다.
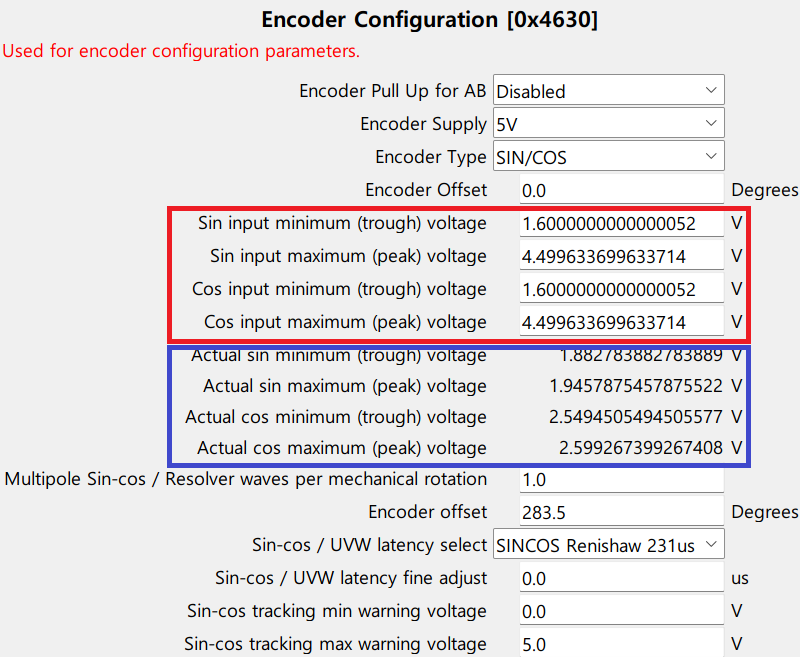
(DVT 설정 내 Encoder Configuration 설정)
강제로 바퀴를 굴리면 파란색 부분에 trough와 peak값이 자동으로 찍힌다. 이 값을 참고해서 빨간색 부분에 알맞게 설정해주면 된다.
참고로 Pre-Op상태가 아닌 Op상태에서 강제로 디스크 돌리는 미친 짓 하지 마세요.
디스크랑 캘리퍼 사이에 손가락 끼는 바람에 피부 괴사해서 지금 손톱 빠진 상태인데 손가락 안 잘린 거에 진짜 감사하고 있는중입니다.
7. 급발진 문제
대회 전날 일어난 문제인데 스로틀을 50% 이상 밟으면 스로틀 떼더라도 미친 급발진을 하는 문제가 발생했다. 다행히 주행 중이 아닌 차량을 공중에 띄워놓고 테스트하던 중 발생한 문제여서 누군가 다치거나 하는 문제는 없었다.
결론적인 문제 원인은 회생제동 옵션 때문이었는데 배터리 리미트 셋팅을 하다가 약계자 셋팅이랑 혼동해서 잘못 설정하는 바람에 문제가 발생했다.
회생제동 설정을 하면 모터에서 발생하는 역기전력을 축전지에 집어넣기 위해 뭔가 동작을 하는 것 같은데 AC-DC 컨버터나 부스트컨버터와 같이 회생제동에 필요한 추가 회로들이 존재하지 않아 제대로 동작하지 못하고, 그게 뭐 꼬이면서 미친 급발진이 일어난 것으로 추정된다.
다행히 BSPD랑 차단회로를 잘 만들어놔서 사고는 발생하지 않았다. 만약 급발진이다 싶으면 바로 비상정지스위치 버튼 누르고 HVD 뽑는게 답이다.
이 사건 이후로 양산차에도 급발진은 언제든 발생할 수 있으며 풀 브레이킹과 사이드 땡기는 연습을 평소에 잘해놔야겠다고 생각하게 되었다.
마무리
마지막으로 말씀드리고 싶은 건 항상 세팅 값 백업을 생활화하셨으면 좋겠습니다.
특히 6번 초기 구동 안 되는 문제는 엔코더 세팅 값 바꾼 적 없는데 이유는 모르겠고 지혼자 바뀌어있던 거라 원인 찾는 데 한참 걸렸습니다.
게다가 세브콘 뭣같이 똑같은 셋팅 여러 군데에 다 퍼져있어서 셋팅 하나씩 바꾸다 보면 뭐 건드렸는지도 자꾸 까먹게 돼서 나중에 잘 안되면 뭐 바꿨더라? 이러는 경우 많기 때문에 좀 잘 돌아간다 싶으면 계속 백업하세요.
그리고 다치지 마세요.