1. 문제 상황
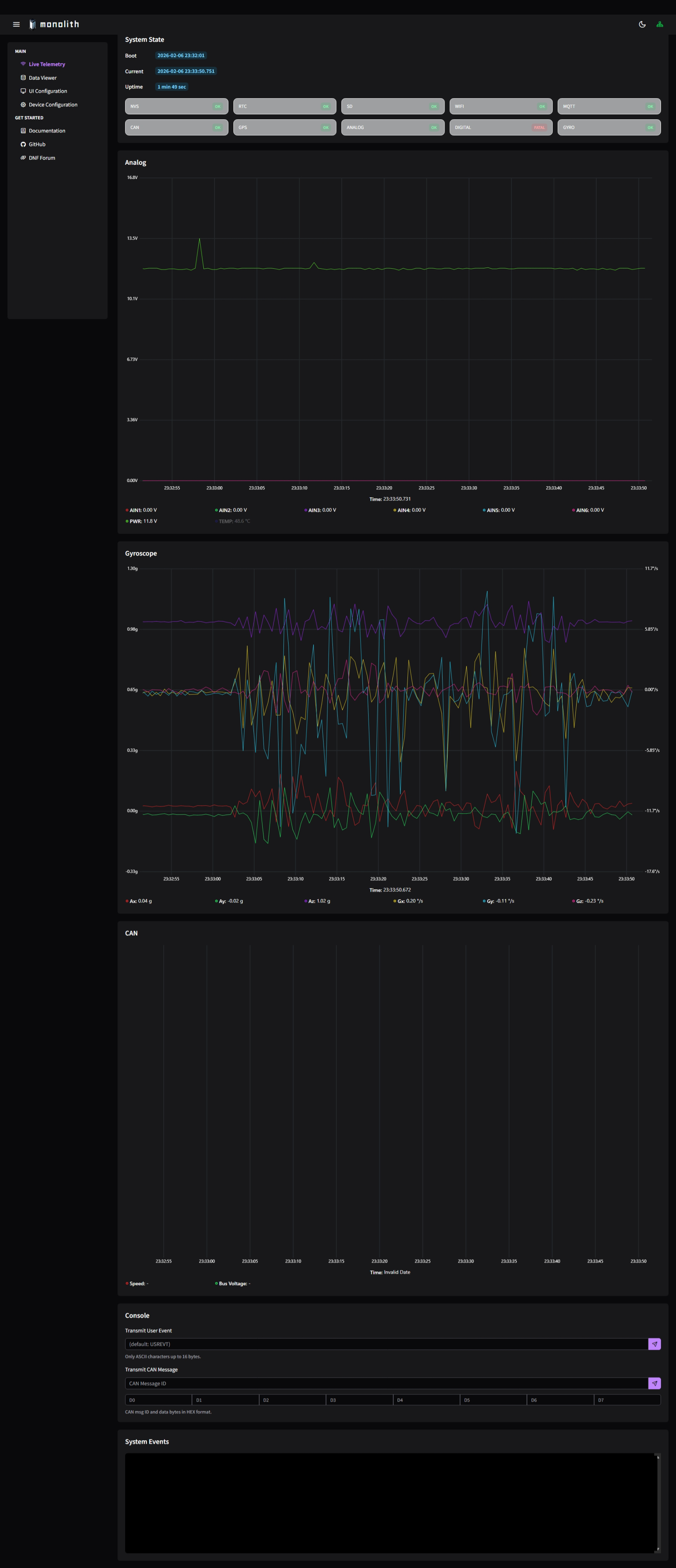
EZkontrol MCU와 Monolith Mini 보드 간의 CAN 통신 설정 중, 소프트웨어 설정 및 하드웨어 배선 조정에도 불구하고 실시간 데이터 수신이 이루어지지 않는 상태입니다. 대시보드 그래프에는 Time: Invalid Date가 표시되며, 데이터 수신이 차단되고 있습니다.
주요 증상: System Events 로그에서 CANALT:10 (Warning)으로 시작하여 CANALT:200 (Error Passive), 최종적으로 CANALT:300 (Bus-Off) 에러 코드가 순차적으로 발생하며 통신이 중단됩니다.
인터넷 연결(MQTT) 및 시간 동기화(RTC_SNTP_SYNC)는 정상이나, CAN 컨트롤러가 유효한 패킷을 해석하지 못하고 에러를 누적하고 있습니다.
1-1. 데이터
- 재현 방법
차량/MCU 스펙:
- MCU: EZkontrol MCU (J1939 기반 29-bit Extended ID 사용).
- Protocol: CAN 2.0B, 250Kbps 전송률.
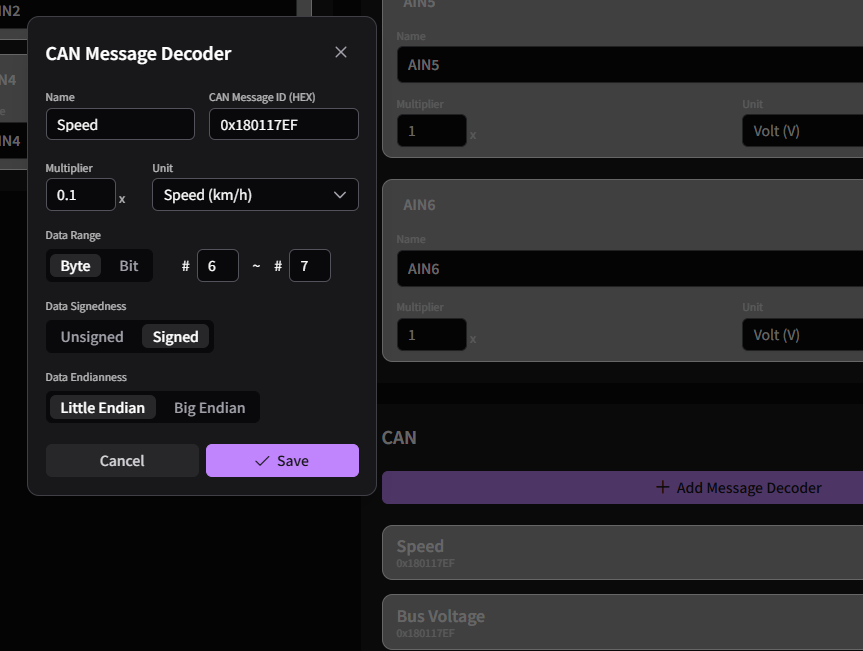
- Target Message: ID 0x180117EF, Byte 6~7 (Motor Speed).
배선 연결:
- 컨트롤러 점퍼선(CAN H, CAN L)을 보드에 연결.
- MCU와 보드 간의 GND(Ground) 공통 연결 완료.
- MCU 내부 120Ω 종단 저항 확인.
소프트웨어 설정 재현:
- Bit rate: 250 kbit/s.
- Filter/Mask: 모든 패킷 수신을 위해 0x00000000으로 개방 시도.
- Decoder: Signed, Little Endian, Multiplier 0.1 설정.
조치 이력:
- Bit rate를 250k, 500k, 125k로 변경하며 테스트했으나 동일 증상 발생.
- CAN High/Low 배선을 스왑(Swap)하여 연결했으나 CANALT:200 에러 지속됨.