“축전지 전압을 먼저 샘플링·홀딩한 뒤, 인버터 전압이 그 값의 92% 이상이 되었을 때 AIR+를 닫는 구조”
SDC_12V 인가
SDC_12V가 들어오면 PCHG_5V가 High가 되고 Reset이 해제됩니다.
이때 300ms 동안 축전지 전압을 전압분배 후 샘플링합니다.
즉, AIR+가 닫히기 전에 축전지 전압 기준값을 먼저 확보합니다.
300ms 이후
카운터가 300ms 도달 신호를 만들고, SR-Latch가 이를 기억하여 PCHG_Active_Sig.를 High로 유지합니다.
동시에 Sampling&Holding 소자는 Sampling에서 Holding 모드로 전환되어 축전지 전압값을 고정합니다.
이 홀딩 전압은 공차를 고려해 92% 기준 전압으로 변환됩니다.
프리차지 릴레이 ON
PCHG_Active가 High가 되면 프리차지 릴레이가 닫히고, 인버터 DC-Link 전압이 상승합니다.
Ready_to_Compare 신호가 High가 된 이후에만 비교기가 동작하도록 하여 샘플링 중 오검출을 방지합니다.
인버터 전압이 축전지 홀딩값의 92% 이상 도달
비교기에서 PCHG_OK가 High가 되고, PCHG_END 신호가 출력됩니다.
이 신호로 AIR+가 닫힙니다.
프리차지 릴레이 OFF 지연
AIR+가 닫힌 직후 바로 프리차지 릴레이를 열지 않고, RC 지연 회로로 약 223ms 지연 후 프리차지 릴레이를 OFF합니다.
이는 AIR+와 프리차지 릴레이가 순간적으로 모두 열린 상태가 되는 위험을 줄이기 위한 안전 로직입니다.
SDC_12V 차단
SDC_12V가 끊기면 PCHG_5V가 Low가 되고 전체 로직이 Reset됩니다.
Timer, SR-Latch, Ready_to_Compare, PCHG_OK, PCHG_END가 모두 Low로 돌아가며 AIR+와 프리차지 릴레이 구동 경로가 차단됩니다.
정리하면, 축전지 전압 샘플링 → 전압 홀딩 → 프리차지 릴레이 ON → 인버터 전압 비교 → IR+ ON → 지연 후 프리차지 릴레이 OFF → SDC 차단 시 전체 Reset 순서로 동작합니다.
프리차지 로직을 보다 안전하게 구성하고자 위와 같은 설계 방향을 적용하였습니다. 핵심 의도는 축전지 전압을 먼저 샘플링 및 홀딩한 뒤, 인버터 전압이 충분히 상승했는지를 비교하여 IR+와 프리차지 릴레이를 순차적으로 제어하는 것입니다. 이를 통해 기존 방식보다 프리차지 시퀀스를 더 명확하게 관리하고, 오동작 가능성을 줄이고자 하였습니다.(현재 대부분 e-formula 참가팀은 RC 지연 공식에 맞게 지연 타이머 로직을 사용하는 것으로 알고 있습니다. 하지만 만약 어떠한 이유로 90%까지 프리차지가 진행되지 않고 타이머가 작동하여 AIR+를 닫게 되면 위험해질 수 있다고 판단되었습니다. 따라서 인버터측 전압을 직접 확인하는 편이 좋다고 생각했습니다.)
다만 설계를 진행하는 과정에서 규정상 문제가 될 수 있는 부분을 확인하였습니다. 규정에서는 동일 PCB 내에 존재하는 구동시스템 회로 간에도 요구 절연거리를 만족해야 한다고 명시되어 있습니다. 그러나 위 로직을 구현하기 위해서는 여러 IC와 안정적인 GND 리턴 경로가 필요하며, 이를 위해 Copper Pour를 통해 GND 면적을 확보하는 것이 회로 안정성 측면에서 유리하다고 판단하였습니다.
문제는 이 경우 Inverter - 기준의 GND와 절연 DC-DC 컨버터를 통해 생성된 12V 회로 사이에서도 절연거리를 확보해야 한다는 점입니다. 절연거리를 모두 충분히 반영하면 PCB 크기가 과도하게 커질 수 있고, 차량 내 제한된 공간에서 다른 컴포넌트와의 간섭 가능성 또한 증가할 수 있습니다. 결과적으로 안전성을 높이기 위해 설계한 회로가 오히려 규정상 불리한 구조가 될 수 있다는 점이 고민입니다.
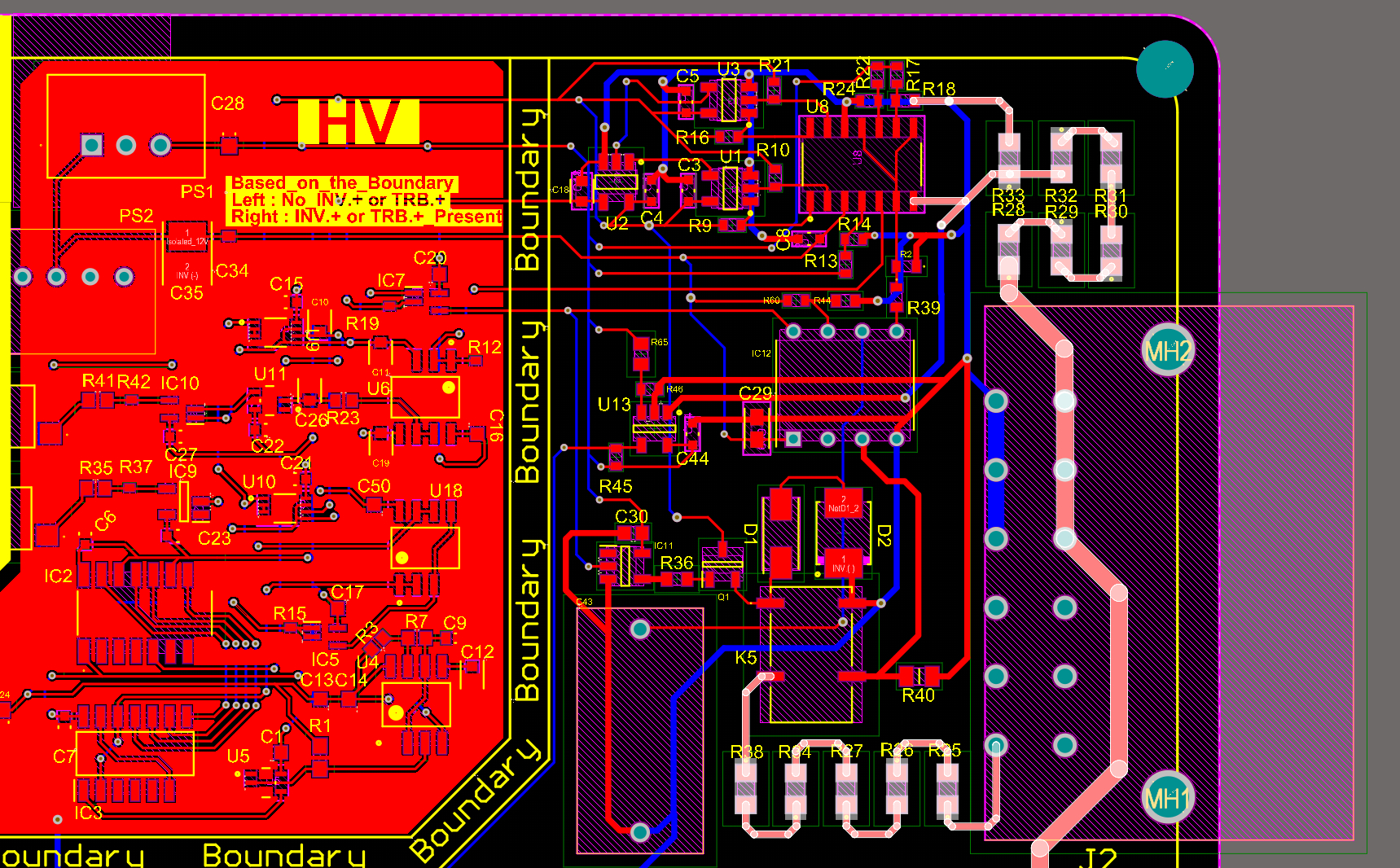
현재는 이를 보완하기 위해 HV+가 직접 인가되는 소자와 그렇지 않은 소자의 영역을 최대한 분리하여 배치하였습니다. 흰색으로 표시된 경로가 HV+의 이동 경로이며, PCB에 입력된 직후 저항 분배를 통해 5V 미만의 전압으로 낮아지도록 설계하였습니다. 따라서 실제 회로 동작 관점에서는 상대적으로 위험도가 낮다고 판단하고 있습니다. 다만 규정상 HV 회로가 PCB에 유입되는 이상, 절연거리 요구사항을 완전히 무시할 수 없다는 점도 인지하고 있습니다.
이와 관련하여 현재 설계가 기존 방식보다 더 안전한 방향이라고 볼 수 있는지 의견을 여쭙고 싶습니다. 또한 해당 설계의 안전성을 입증할 수 있는 방법이 있을지, 또는 규정을 만족하면서도 유사한 로직을 구현할 수 있는 더 적절한 회로 구성이나 PCB 배치 방향이 있다면 조언 부탁드립니다.
시스템의 고도화로 인한 복잡성 증가와 오동작을 최소화하는 단순한 설계는 항상 모든 엔지니어링에서 가장 어려운 저울질입니다. 어느 쪽이 진짜 더 안전한 방향인지는 당연히 아무도 알 수 없고 다 끝난 후에나 결과론적으로 이야기할 수 있을 뿐이죠.
언급하신 것처럼 RC 지연 회로를 사용하면 어떤 문제로 실제 초기충전이 이루어지지 않아도 회로가 닫힐 수 있는 위험이 있습니다. 마찬가지로 다양한 IC를 사용하여 로직이 복잡해지고 노이즈 내성이 떨어지면, 그것도 그것대로 회로가 어떻게 동작할지 모르는 예측 불가능한 요소가 늘어나는 것입니다.
다만, 동일 PCB 내에 존재하는 구동시스템 회로 간에도 요구 절연거리를 만족해야 한다 는 규정은 구동시스템 최대 전압 기준이 아니라 각 노드에 실제로 걸리는 최대 전압 기준입니다. 절연된 12V, 전압 분배된 5V 등은 기판 절연코팅 시 공간거리, 연면거리 모두 1mm를 적용받습니다. 아무리 제한된 면적이라고 해도 소자 간 거리를 1mm조차도 확보할 수 없는지는 의문이네요.
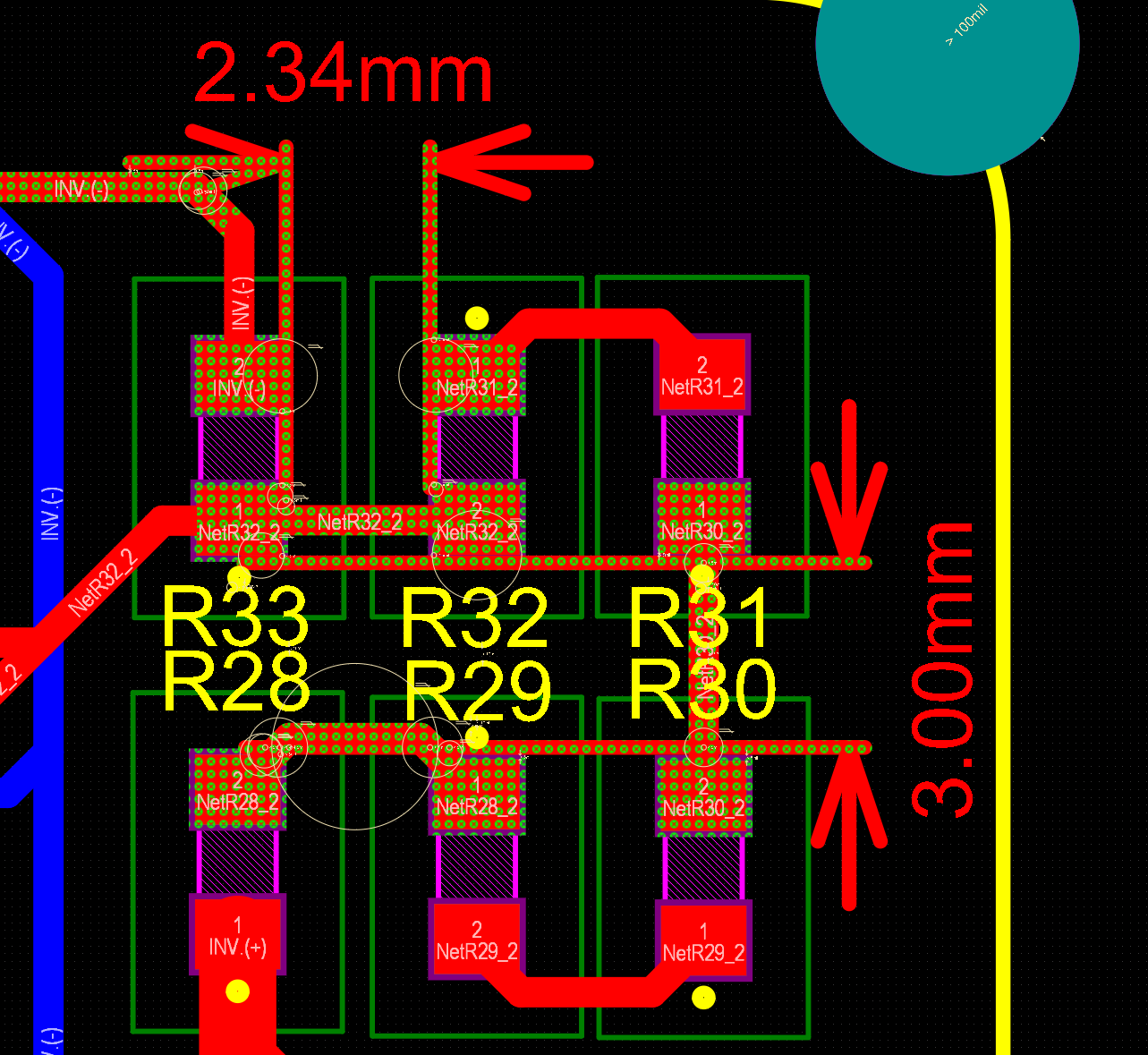
같은 이유로 회로도나 PCB 레이아웃의 각 지점에 대한 설명이 없어서 모르겠으나, 슥 훑어보기에는 소자들 간의 연면거리보다 전압 분배 저항의 배치가 훨씬 신경쓰입니다.
예를 들어, 위 회로에서 R33이 10k, 나머지가 100k 저항이라고 치고 R28의 아래쪽이 300V라고 가정하면, 대충 R33의 아래쪽은 6V, R28 위쪽은 240V가 걸립니다. 전압차이는 234V이고, 이 경우 규정에 따라 공간거리 1.5mm, 절연코팅 시 연면거리 2mm를 만족해야 합니다. 제가 보기에는 이쪽이 더 위험해 보이네요.
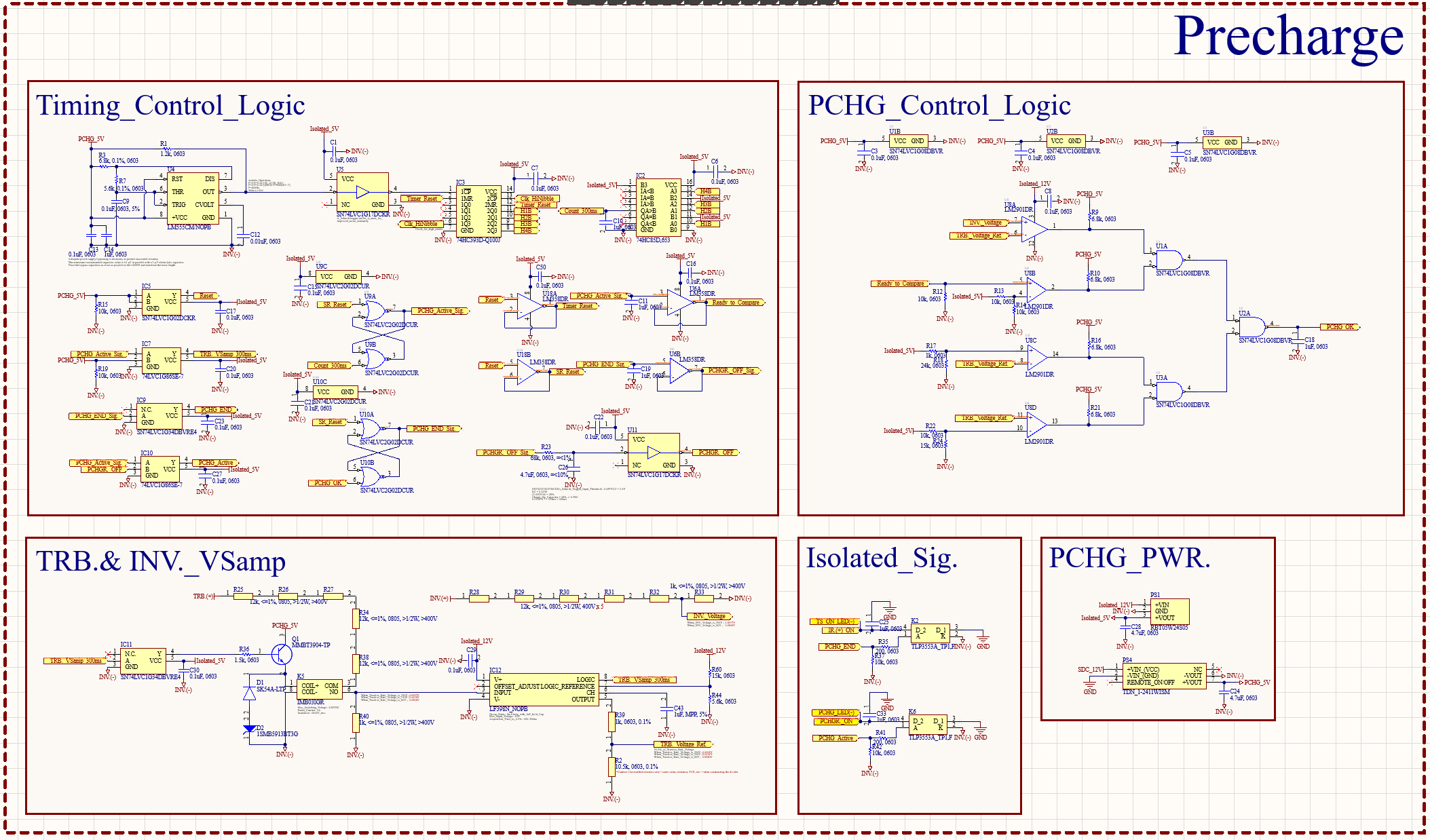
회로 동작의 이해를 위해서는 회로도가 필수입니다. 하지만 회로도가 없어 'Timer, SR-Latch, Ready_to_Compare, PCHG_OK, PCHG_END’와 같은 신호에 대해 이해하기 힘든 부분이 있는 것 같습니다. 다음에 질문하실 때는 회로도를 함께 첨부해 주시기 바랍니다.
질문 내용에 대한 답변과 궁금한점 남겨드립니다.
작성해 주신 내용의 흐름상 300ms가 되었을 때 Sample & Hold 하는 것 같습니다. 300ms 동안 축전지 전압을 Sampling 한다는 것은 단순히 계속 전압 측정을 한다는 것을 의미하는 게 맞나요?
샘플링 중 오검출을 방지하겠다는 것은 노이즈에 의해 잘못 판단하여 일찍 프리차지가 끝나는 상황을 막겠다는 것으로 보입니다.
Ready_to_Compare 신호가 어느 시점에 High가 된다는 것인지 잘 모르겠지만, 어느정도의 노이즈는 센싱라인에 RC LPF필터를 추가하는 방식으로 어느정도 노이즈에 대한 대비가 가능할 것 같습니다.
규정에서는 "초기충전회로는 HV 릴레이가 닫힌 후에는 작동을 멈춰야 하며"라고 되어 있습니다.
프리차지 릴레이 OFF에 지연을 둔다는 것은 마지막 AIR가 닫힌 뒤에도 초기충전회로의 릴레이가 OFF되지 않는다는 것이므로, 규정에 맞지 않습니다. 또한 마지막 AIR와 프리차지 릴레이가 동시에 Open되는 상태가 발생하더라도 전류가 흐를 전류 패스가 없는 상황이기 때문에 위험 요소는 없다고 생각이 듭니다.
맞습니다. 하지만 오히려 앞에서 설명하셨던 것처럼 노이즈에 의해 잘못 판단하여 마지막 AIR를 일찍 닫을 위험성도 있습니다. 따라서 비교기를 통해 충분히 캡의 전압이 충전되었는지 & RC 회로에 의한 충전 시간에 도달하였는지와 같이 AND 조건으로 회로를 동작시키는 것이 더 설득력 있는 방법이라 생각합니다.
절연 거리에 대해서는 현 규정에선 구동 시스템들 사이에서도 필수 간격에 의해 분리되어야 한다고 되어 있지만, 실제로는 GLVS도 동일하게 절연 거리는 필수입니다. 따라서 안전성을 높이기 위해 설계한 회로가 오히려 규정상 불리한 구조가 될 수 있다는 것은 말이 안 된다고 생각합니다. 안전을 위해 PCB의 사이즈가 커진다면 그것은 어쩔 수 없는 것이고, 규정을 만족하며 PCB 사이즈를 줄이는 것 또한 팀의 노하우입니다.
PCB 아트웍 사진에 표기된 문장으로 봤을 때 왼쪽이 GLVS 영역, 오른쪽이 구동 시스템 영역인 것으로 이해됩니다. 그런데 왜 왼쪽 영역에 HV라고 표기되어 있나요?
그리고 GLVS와 TS 시스템 사이의 신호 또는 전원은 절연이 필요합니다. 절연 소자 없이 Boundary를 가로지르는 패턴은 무엇인지 궁금합니다.
Ready_to_Compare 신호는 단순히 노이즈로 인한 오검출을 막기 위한 목적만이 아니라, 프리차지 진행 전 필요한 이전 시퀀스가 정상적으로 완료되었는지를 확인하는 신호로 설계하였습니다. 노이즈에 민감할 수 있는 지점에는 RC 필터를 일부 추가해두었습니다.
규정과 관련해서 한 가지 확인드리고 싶습니다. 규정에서 요구하는 내용이 "프리차지가 완료되어 AIR+가 닫힌 이후에는 프리차지 저항과 연결된 프리차지 릴레이가 Open되어야 하며, 이 동작은 AIR+가 Close되는 것과 동시에 이루어져야 한다"는 의미로 이해하면 되는지 여쭙고 싶습니다.
조언해주셔서 감사합니다. 이후 회로 설계를 진행할 때 말씀해주신 내용을 참고하여 더 안정적이고 규정에 적합한 로직을 구성해보겠습니다.
이번 피드백을 통해 아직 PCB 아트웍 측면에서 부족한 부분이 많다는 것을 느꼈습니다. 앞으로 더 개선해나가겠습니다.
LV 영역은 사진에 보이는 위치보다 더 왼쪽에 배치되어 있습니다. 해당 Boundary는 GLVS와 TS를 구분하기 위한 기준이라기보다는, HV+가 존재하는 영역과 그렇지 않은 영역을 구분하기 위해 설정한 것입니다.